← Back to Projects
LLM Robot
2025An integrated Large Language Model (LLM) enables intuitive, natural language control of a ROS2 powered robot.
Technologies Used:
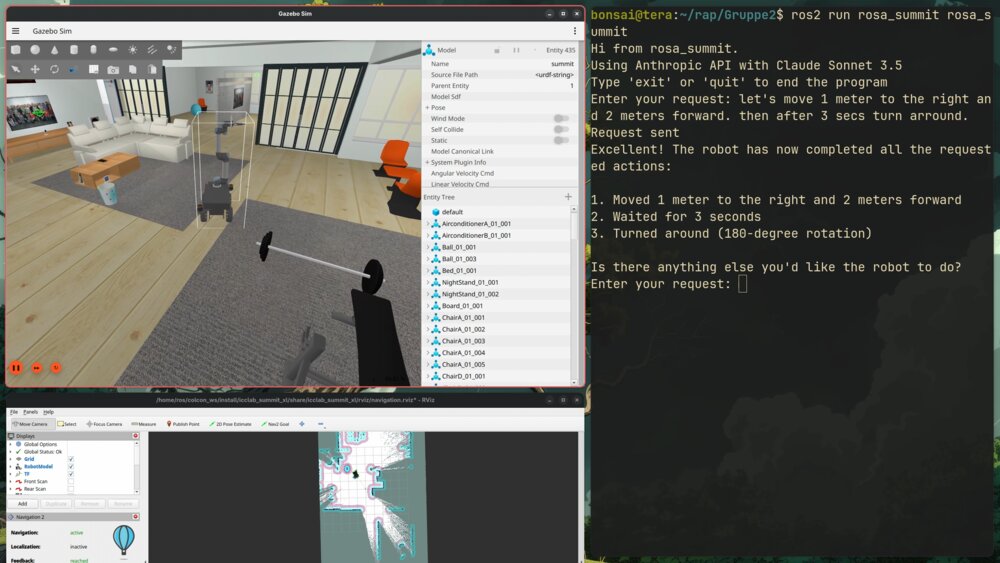
This project, developed by a team of students for a university course, demonstrates the integration of Large Language Models (LLMs) with robotic systems using ROS2. The system enables natural language control of a robot, allowing for intuitive human-robot interaction through conversational commands.
Demonstration
The following video demonstrates the robot being controlled by the LLM to map a new environment.
Features
- SLAM: Create and save new maps using simultaneous localization and mapping.
- Relative Navigation: Control the robot’s movement based on its current position.
- Pathfinding: Navigate to saved locations using Nav2.
- Obstacle Avoidance: Dynamically avoid obstacles with Nav2.
- Frontier Exploration: Automatically explore new and unknown areas.